
| Raspberry Pi でPWM を出力 |
| Raspberry PiのPWM機能ではサーボモータを制御できない。サーボモーターの制御にはServo
Blasterを使う。といわれています。 本当にハードウェア機能でサーボモータ制御のパルスを出すことができないのでしょうか? できます! 自分で作ったぞ。 証拠映像だ! 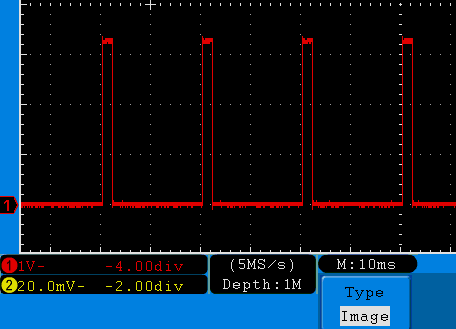 20ms周期2ms幅のパルスがでています。 C++で作ったプログラムです。 パルスの周波数は1.15Hzから4.8MHzまで対応しています。 パルス幅の指定は、 SetPwmByFreq(2.0, 50); 2.0Hz,duty 50%で指定する。 SetPwmByMilliSec(20, 1.5);// 0 deg 20msecの周期、1.5msecのパルス幅で指定する。 と直感的になっています。 |
| ソースファイル |
| 必要なファイル gpio.h gpio.cpp です。 使い方は簡単です。 main.cpp |