
 |
|
| ラズベリーパイとTWELITEを無線で接続する | |
TWELITEとつなぐには
無線機能を有するマイコンTWELITEとRaspberry Piをつなぐにはどうするか? まずTWELITEが必要です。(当たり前!) 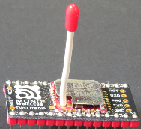 通信するためのインターフェースはどうする? I2C これはセンサーなどを接続するために使うので候補外。 UART ラスベリーパイと端子電圧が3Vで同じなので使えそう。 デジタルIO 通信が遅ければつかえる。しかしこれは面倒。 UARTなら簡単にできそうだが、折角無線機能があるのに有線接続ではもったいない。また長い距離に対応できない。 そこで無線通信をするためのデバイスとしてMONOSTICを使うことにしました。 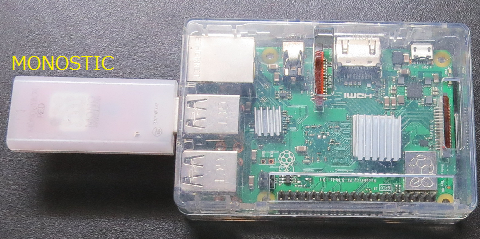 USBコネクタに接続します。ラズベリーパイから見るとUARTデバイスです。 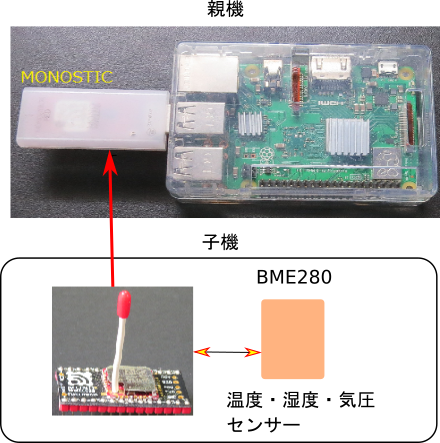 ラスベリーパイとMONOSTICは親機にします。子機(TWELITE)から送られてくるセンサーのデータを受信します。送信はしません。sad取得したデータをシリアル通信を介してラスベリーパイに送信します。 TWELITEは子機にします。I2Cで接続した温度・湿度・気圧センサーBME280と接続します。I2Cのセンサーは知っている限り2種類あり、SCLとSDAのピンは位置が違っています。悪いことに見た目が似ています。よく説明書をみて結線してください。 TWELITEはセンサーから取得したデータを1秒に1回送信します。受信はしません。
作成するソフト
以下はC++のソースなので説明は割愛します。 TWELITE 温度・湿度・気圧センサーBME280 のデータを取得する機能 取得したデータを無線で送信する機能 ダウンロード:sensor.zip MONOSTIC 子機から送信されてデータを受信 受信したデータをシリアル通信でラズベリーパイへ送信 ダウンロード:Sensor-MONOSTICK.zip そしていよいよラズベリーパイによるシリアル通信のプログラムです。ファイル名はtwe-lite.pyです。早速コードを シリアル通信: pySerialが必要です。最新版のOSをインストールしたのならすでに入っています。 確認の方法 pip3 list で表示されます。入ってないのなら pip3 install pyserial でインストールできます。 シリアルの使い方: インポートが必要 import serial 初期化 main()内で、 g_Serial = serial.Serial('/dev/ttyUSB0', 115200) これだけです。ボーレートを115200に設定しています。また、ttyUSB0は環境によって違います。自分で調べてください。 スレッドの開始: main()内で、 threadRx = threading.Thread(target=rx232c) threadRx.start() rx232cという関数がスレッドになります。この関数で受信の処理をします。 スレッド:rx232c TCCOSTICから送られてくる通信データは、 T=18 H=45 P=1013 '\n' です。 1文字受信してそれが改行なら受信完了とします。 そうでなければ受信バッファに蓄えます。 受信完了のフラグが立つと main()内で、 isRxData()で受信データの正誤を判定して、データを表示します。 終了: コントロールCによる割込みで終了します。 except KeyboardInterrupt: のところです。 出力: 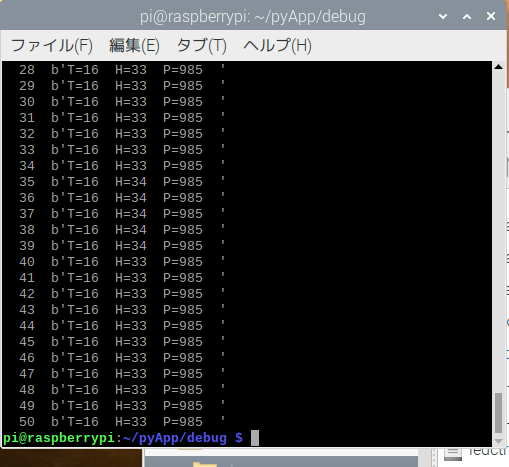 これだけだと地味過ぎすので、 取得したデータを 記録する グラフで表示する webページにのせる などいろいろ考えられます。 |